 Portuguese
Portuguese 

FAQ para módulo walkie talkie SA818
Hoje, o editor do NiceRF resumiu alguns problemas comuns do módulo walkie talkie SA818, que é conveniente para os usuários configurarem corretamente e como
Jan . 2024
Devido ao fraco sinal interno, o GPS não pode ser usado para posicionamento interno. No entanto, a procura por posicionamento interior é ampla e muitas aplicações necessitam de localizar a posição de pessoas ou objectos no espaço interior, especialmente a gestão de armazéns.
O alcance TOF é um algoritmo de posicionamento por radiofrequência (rf), que pertence à tecnologia de alcance bidirecional, que utiliza os sinais de dados do tempo de voo entre o bonde e o receptor para medir a distância entre dois pontos.
1. Meça o intervalo de tempo entre o envio do sinal de dados pelo mestre e o recebimento do sinal de resposta do escravo, anotado como Tt.
2. Meça o intervalo de tempo entre o escravo receber o sinal de dados do mestre e enviar o sinal de resposta, observe como Tr.
3. O tempo de voo unidirecional para o sinal entre o mestre e o escravo:Tf=(Tt-Tr)/2.a distância entre os dois pontos: d=c*Tf, c representa a velocidade de propagação da onda eletromagnética.
SX1280 é um chip de localização de distância 2.4G baseado na modulação LoRa recém-lançado pela semtech. Além das funções de comunicação sem fio comumente usadas, o SX1280 também integra a função de alcance TOF (tempo de voo).
O algoritmo foi integrado no chip e os resultados variados podem ser obtidos com operações simples, que podem ser usadas para que os usuários realizem rapidamente o posicionamento interno.
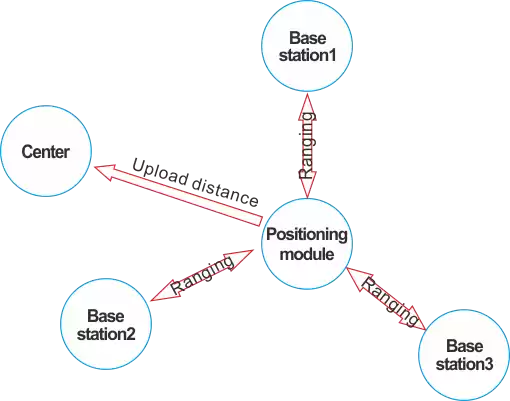
Este algoritmo precisa de pelo menos 5 módulos sem fio com chip SX1280, requer um centro, três estações base e pelo menos um módulo de posicionamento.
◆ A central é responsável por receber e contar as informações de distância do módulo de posicionamento e carregá-las no servidor.
◆ As três estações base utilizadas como escravas na variação precisam ser instaladas uniformemente no armazém para que o módulo de posicionamento calcule a distância.
◆ O módulo de posicionamento é instalado nas mercadorias a serem localizadas, mede ao centro as distâncias entre as três estações base separadamente (status de alcance) e carrega essas três distâncias para o centro (status de comunicação).
1. O módulo de posicionamento está no estado de recepção.
2. A central envia a instrução que obtém informações de posicionamento para o módulo de posicionamento.
3. O módulo de posicionamento muda para o estado de alcance.
4. O módulo de posicionamento mede a distância com a estação base 1 e obtém a distância d1.
5. O módulo de posicionamento mede a distância com a estação base 2 e obtém a distância d2.
6. O módulo de posicionamento mede a distância com a estação base 3 e obtém a distância d3.
7. O módulo de posicionamento muda para o estado de comunicação.
8. O módulo de posicionamento carrega d1, d2, d3 para o centro.
9. O centro carrega d1, d2 e d3 para o servidor.
 +86-755-23080616
+86-755-23080616
 vendas@nicerf.com
vendas@nicerf.com
Site: https://www.nicerf.com/
Endereço: 309-314, 3/F, Bldg A, edifício comercial Hongdu, Zona 43, Baoan Dist, Shenzhen, China



política de Privacidade
· Política de Privacidade
No momento não há conteúdo disponível
E-mail: sales@nicerf.com
Tel:+86-755-23080616